Hi Allan,
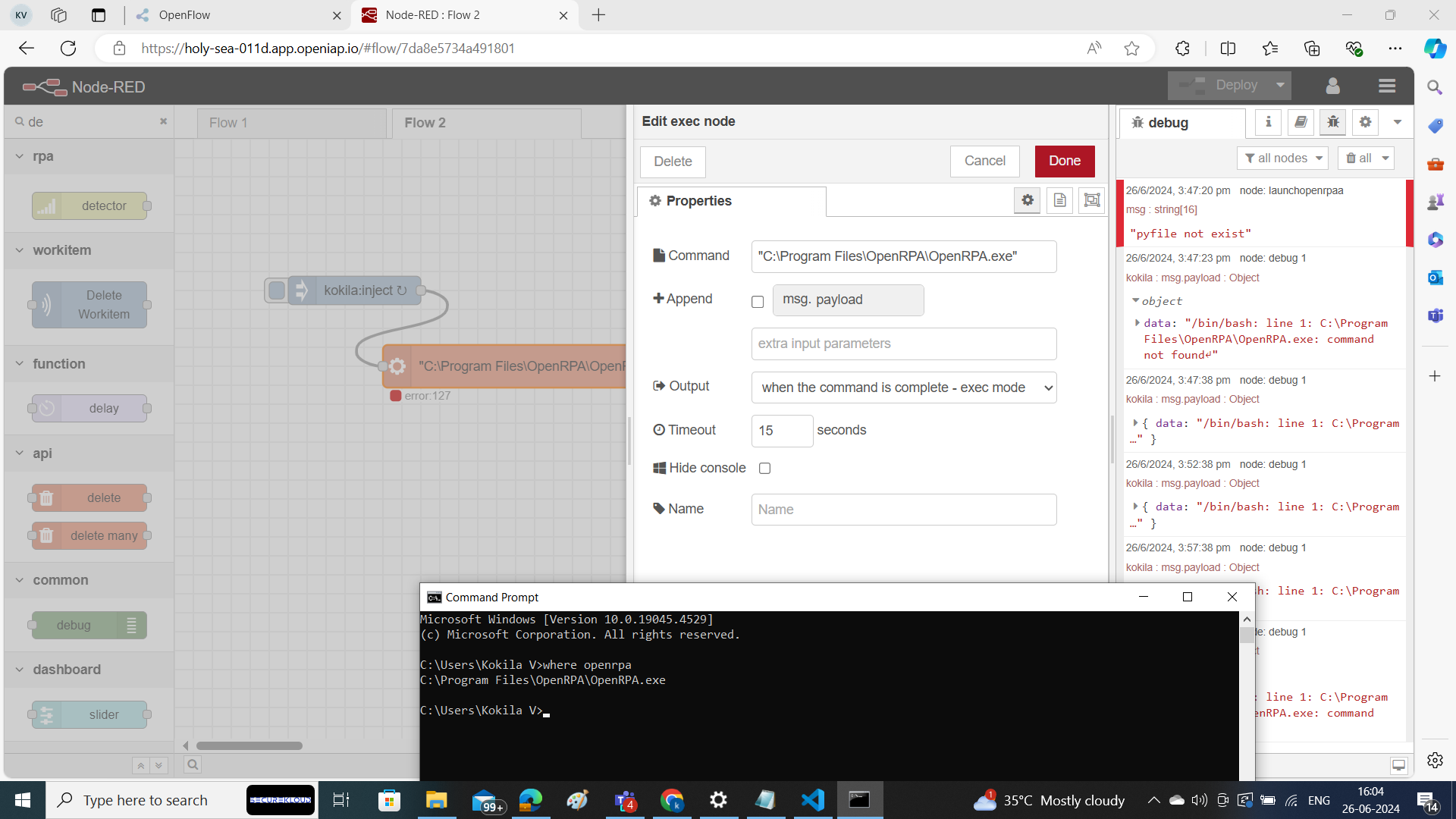
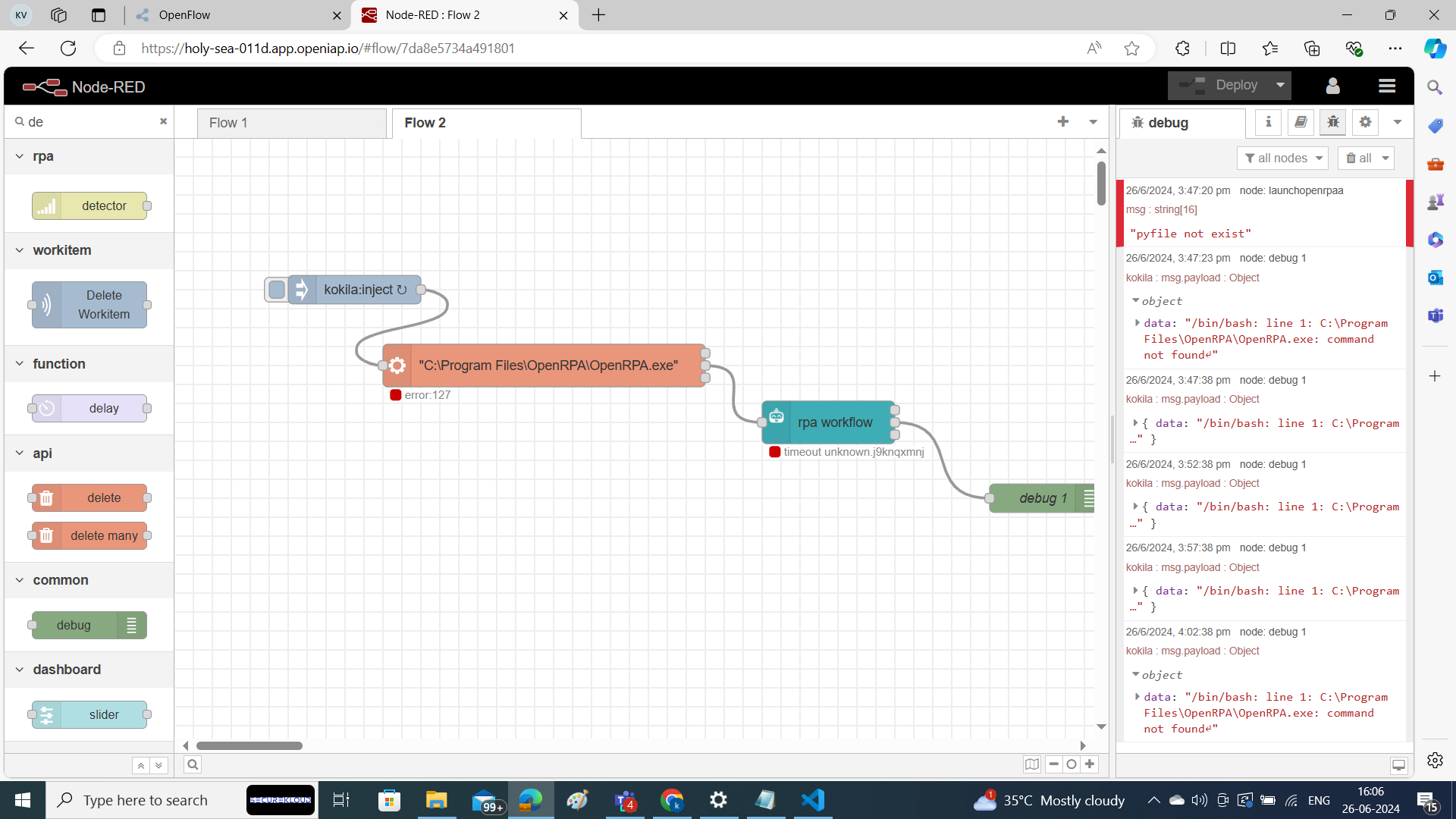
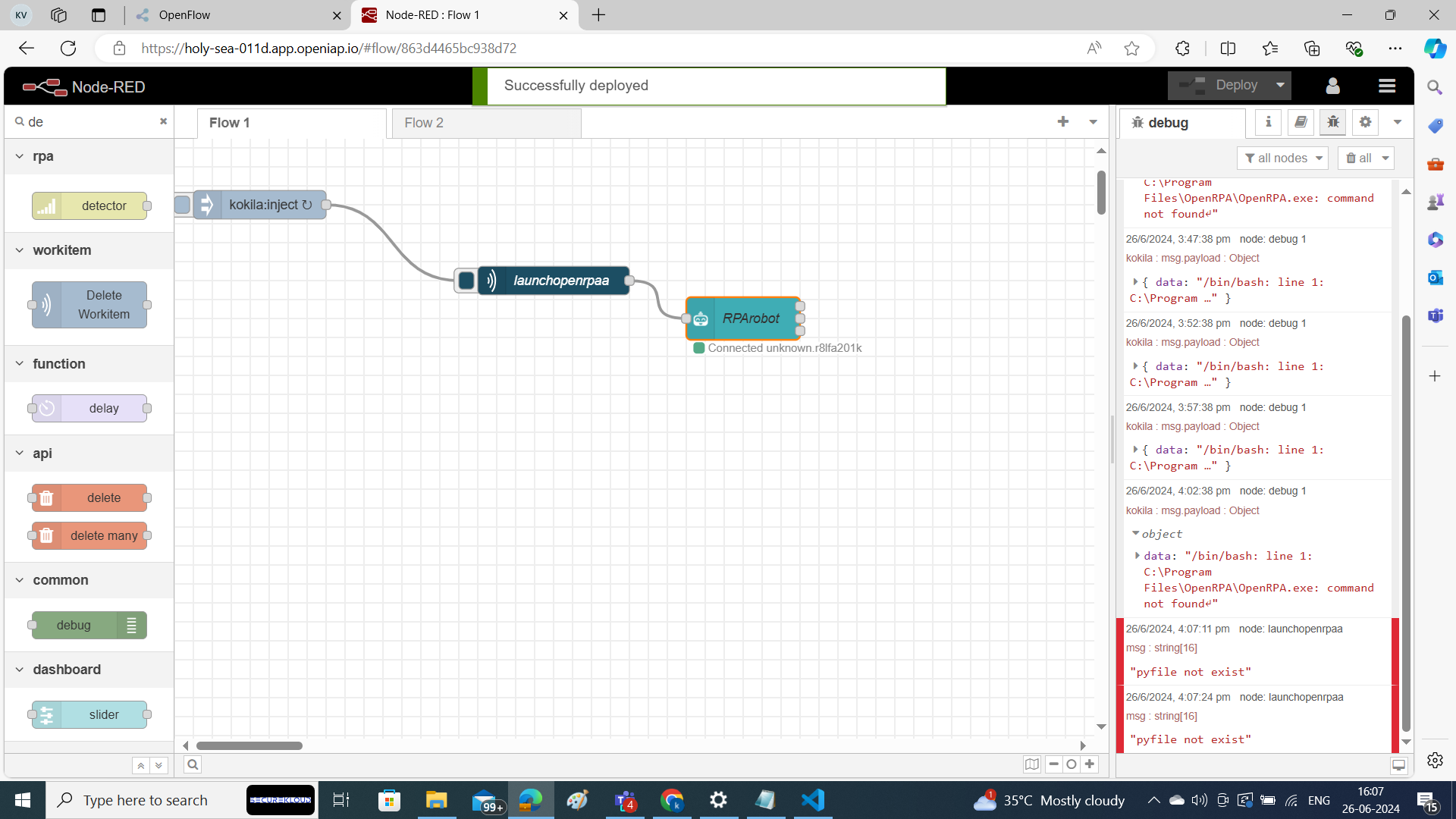
Recently, I started a POC in OpenRPA for my organization. The objective of the POC is to “have to automatically run our project every day once.” So I created one work flow, and I used Node-Red to schedule the workflow. In node-red, I used “Inject Node” to schedule the process, and I used Robot Node to execute the workflow. It works fine when an open-RPA application is in open mode (already launched). But it’s not working; I get a “timeout” error under the robot if I close the open-RPA application. So I used the “Exec” node to launch the open-rpa application if it was closed, And, I mentioned my "open-rpa.exefile location correctly in exec node. But still am getting “command not found” error. Note: The OpenRpa application is launched successfully while using the same openrpa.exe file location in the command prompt.
Also, I tried another way and created one Python script to launch OpenRPA. And I used the.py file in the Python shell node but am getting the “pyfile does not exist” error.
The nodered you started, is not running on your local machine, its running in google cloud.
There are many different ways to solve this, but most of them involves more complex solutions
But an easy way to get what you want it to not use openflow, but just use windows scheduler.
See Scheduling Robot for more info. Remember you must use currently logged on user in your job task.
Hi Allan is there any way we can check status of robot. if it is running ideal connected or not connected this is very usefull when multiple bots running on multiple machine so that we can schedule bot to wait to execution to complete or allocate automation on another machine
That is already a feature.
Create a role, and enable “rpa role” add more than one robot to the role ( and then logout and back in on all those robots, to refresh the token )
now you can assign workflows to run “on the role” and not a specific robot. If a robot is offline, nothing will happen to that, if a robot is online but busy running a workflow it will reject any new request and those will then get sent to other robots.
But just as when you are sending message directly to robots, if the robot does not pick it up in a reasonable time, you will get a timeout error. and that error is then a signal to you about maybe adding more robots ( or use workitems )
Can we check status using API?
No. That is one of the few things, that i really miss with the OpenRPA integration.
It could potentially be made, by adding a state machine that queries the workflow instance’s static class.
It could be “built into” OpenRPA, but I prefer to wait with that, till I’m ready to give OpenRPA the “big overhaul”
Can we make easy solution in which open RPA write its status to openflow database to every 10 seconds when it is open and we can run a query in get status or last seen of a robot